Micromouse Robotics Competition

Growing up, I have always been fascinated by robotics and developed a deep passion in creating electro-mechanical systems. My first obsession with robotics was the NASA Opportunity Rover, I remember well my aspirations to one day build robots for NASA. In my high school years, I began delving into medical robotics and was deeply inspired by the daVinci Surgical Robot. I knew that I wanted to continue down this path to build highly-intelligent robots. After helping with 3D prints for the Robotics Crew in my role as a Makerspace Specialist, I joined the Union College Robotics Crew (UCRC) in 2017. During my time in the team, I was able to compete in the 2018 IEEE Brown Robotics Competition and the 2019 Princeton Robotics Competition with the robots my team and I created. The goal of the competition was to designed and programmed robots to autonomously traverse a 9’ x 9’ maze in a timed race. In the team, we researched motion planning strategies and pathfinding algorithms in a map-less environment for autonomous vehicle navigation.
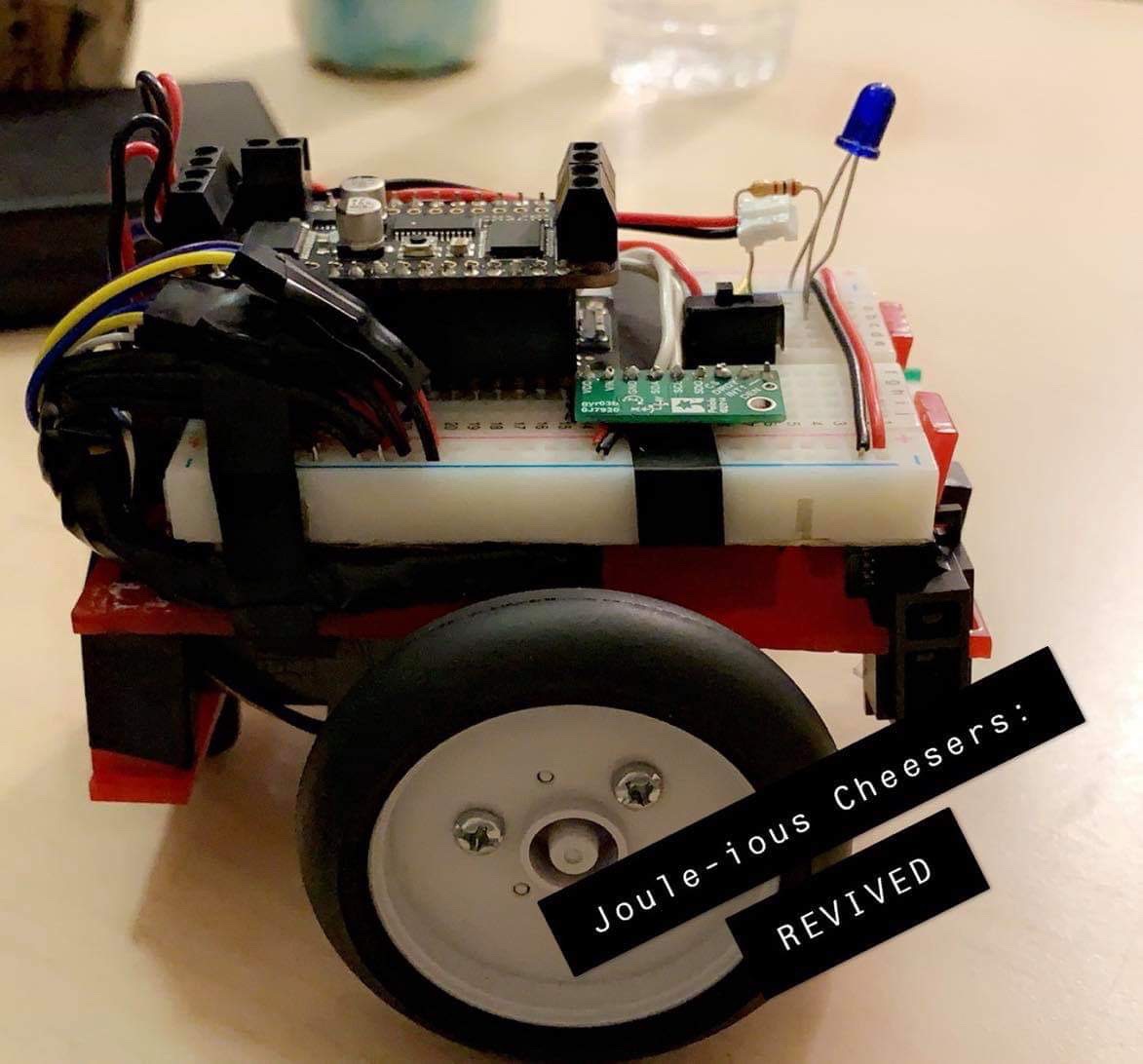
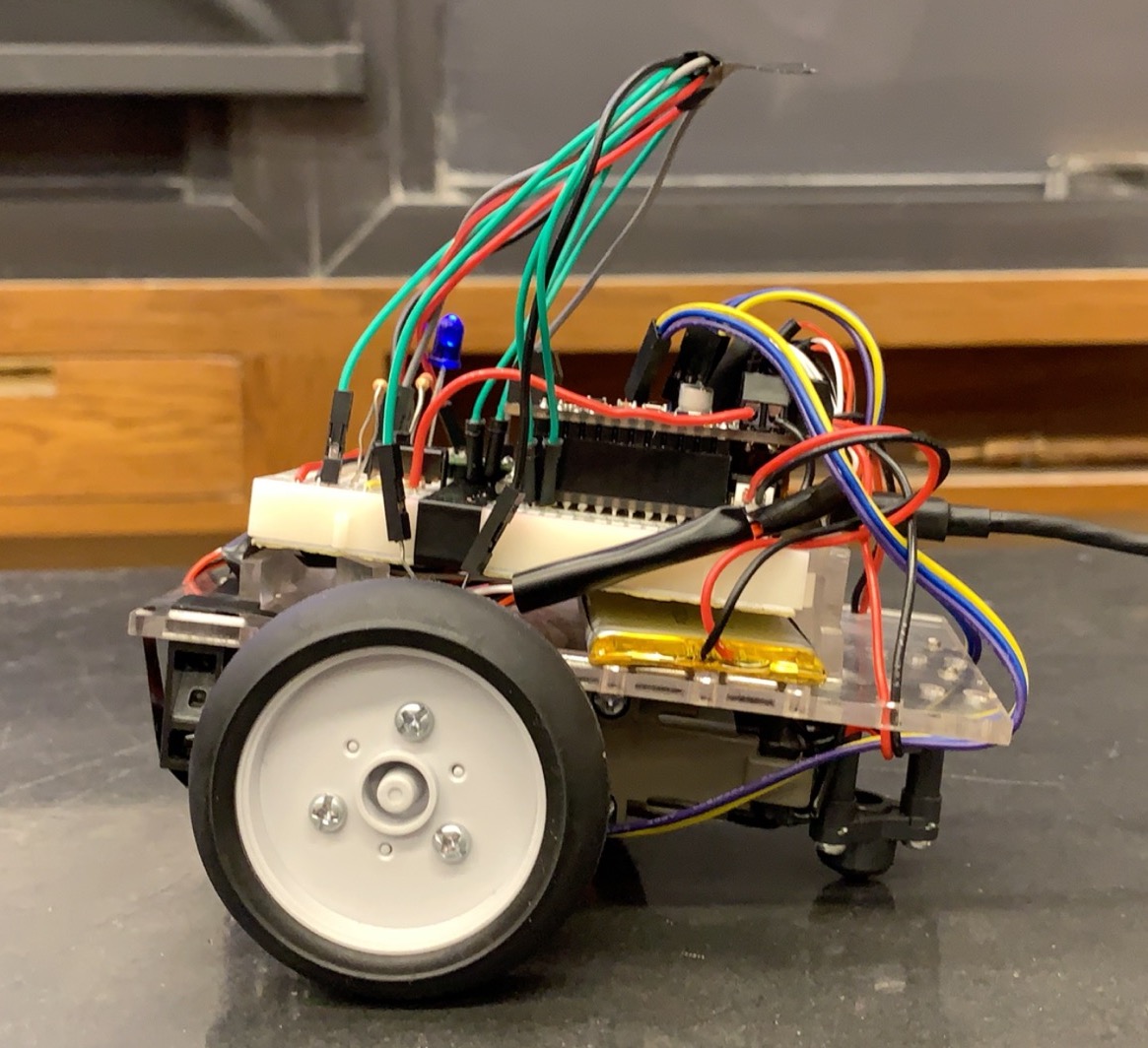
During my senior year in college, I also became the first female president of the robotics crew and was able to lead teams to practice better project management, initiated use of version control, and rigorous documentation. I further established a supportive mentoring network to retain underclassmen and women engineers. As president, I drove progress to develop an easily replicable and optimized robot prototype at 33% the cost of a traditional build to serve as a blueprint for future robots. Below is the Princeton Robotics Competition presentation we used to showcase our robot, “Joule-ious Cheesers” which serves as the template for a low-cost, modular, and light-weight robot prototype.